About me
Ciao! I am currently a Research Scientist Intern at NVIDIA, and a final-year PhD student in Deep Learning and Computer Vision at the University of Trento, under the joint supervision of Prof. Elisa Ricci and Prof. Zhun Zhong. You can find my up-to-date résumé here.
Recently, I completed my research visit at the University of California, Los Angeles (UCLA), where I worked on automatic urban simulation scene creation for embodied AI learning under the guidance of Prof. Bolei ZHOU.
From June 2023 to December 2024, I also spent 18 wonderful months as a Visiting Researcher at NAVER LABS Europe exploring open-vocabulary object detection supervised by Gabriela Csurka, Riccardo Volpi, and Tyler L. Hayes, in the team led by Diane Larlus.
Before starting my PhD, I earned two Master’s degrees—Summa Cum Laude—from KTH Royal Institute of Technology (Sweden) in Intelligent Autonomous Systems and from the University of Trento (Italy) in Mechatronics Engineering. I also spent three years as an Innovation Engineer at SIEMENS Smart Infrastructure Division, designing IoT-based automation solutions.
🚨On the Job Market:🚨 I’ll be graduating in Fall 2026 — if you’re working on open-world physical AI, let’s chat!
The Research I Like & Do: developing models that enable open-world machines, like the robots I've worked with below (★: personal side project, developed full-stack from scratch), to see, understand, reason, and move through our chaotic visual, semantic, and physical world.
-
 Unitree Go2
Quadruped
Unitree Go2
Quadruped
-
 Coco
Delivery Robot
Coco
Delivery Robot
-
 SMaRC
Underwater AV
SMaRC
Underwater AV
-
★
 Wolowitz
Manipulator
Wolowitz
Manipulator
-
★
 Sequoia
Minibot
Sequoia
Minibot
Unitree Go2
Quadruped
Things I'd like to share
-
[04/2026]: I'm excited to share that I've joined the NVIDIA Research
 as a Research Scientist Intern, working on unified 4D perception foundation models!
as a Research Scientist Intern, working on unified 4D perception foundation models!
- [01/2026]: UrbanVerse accepted to ICLR 2026!
- [10/2025]: After nine wonderful and inspiring months at UCLA, our new work UrbanVerse — scaling urban simulation scenes for embodied AI — is out! Check out the project here!
- [01/2025]: I'm excited to share that I joined the Zhou Lab at UCLA as a visiting researcher, where I'll have the privilege of being advised by Prof. Bolei ZHOU.
- [10/2025]: Honored to be selected as Outstanding Reviewer for CVPR 2025!
- [07/2024]: I successfully got $5,000 funding (in credits) from OpenAI to support my research!
- [05/2024]: One paper on incremental novel class discovery with large scale pre-trained models is accepted as an Oral paper at ICPR 2024.
- [05/2024]: Filed my first US Patent: "A Method for Using Semantic Hierarchy Trees to Increase the Robustness of Open-vocabulary Object Detection Models"!
- [02/2024]: One paper on open-vocabulary object detection with semantic hierarchy (work done with NAVER LABS Europe) is accepted as a Highlight paper, 2.8% acceptance rate at CVPR 2024! Thanks to the team!
- [01/2024]: One paper on discovering fine-grained semantic concepts with LLMs is accepted to ICLR 2024! See you in Vienna this May!
Selected Publications
UrbanVerse: Scaling Urban Simulation by Watching City-Tour Videos
International Conference on Learning Representations (ICLR), 2026
Organizing Unstructured Image Collections using Natural Language
The IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR Findings), 2026
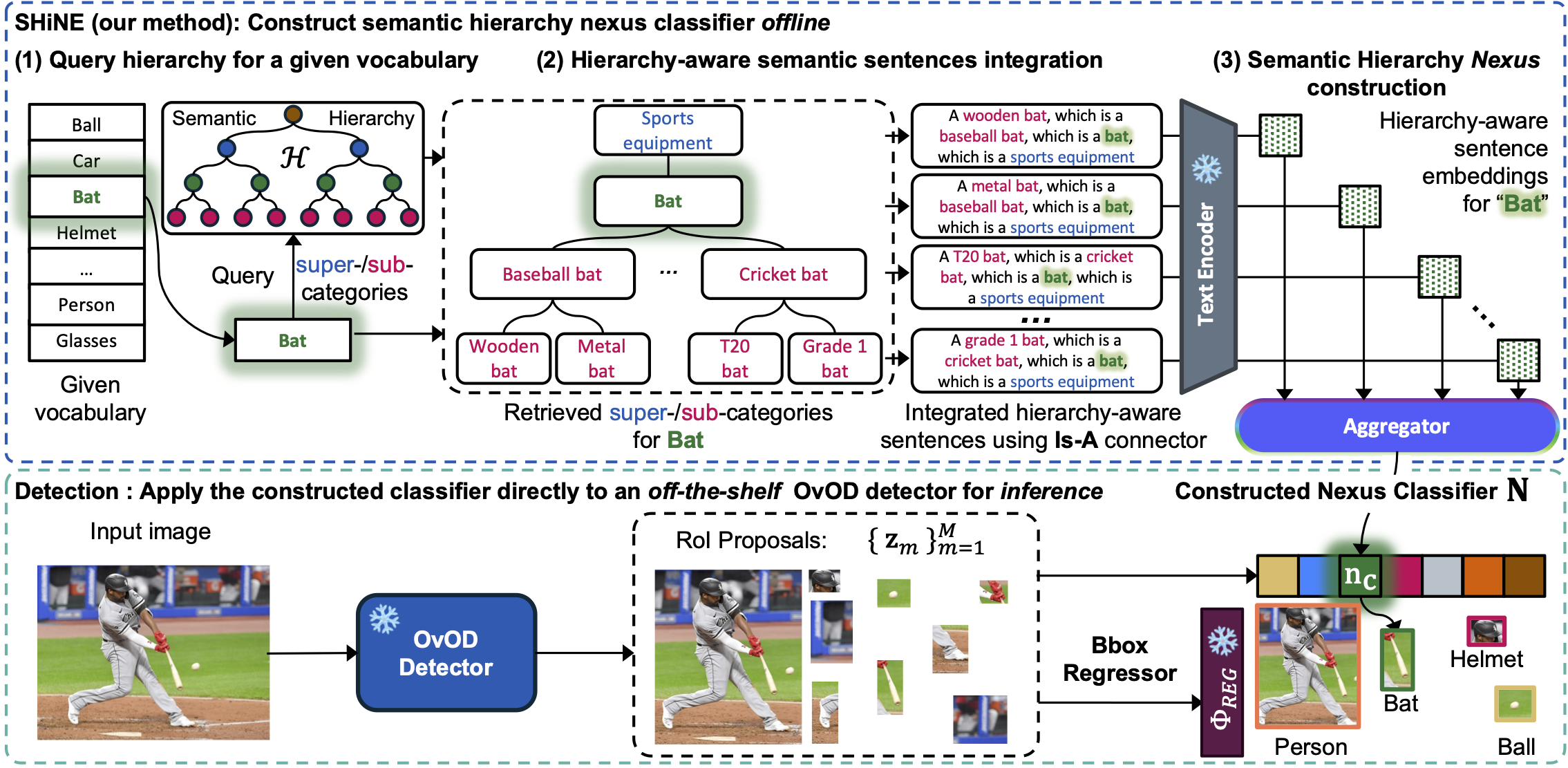
SHiNe: Semantic Hierarchy Nexus for Open-vocabulary Object Detection
The IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR, Highlight paper, 2.8% acceptance rate), 2024
US Patent App. 19/171,817, 2025
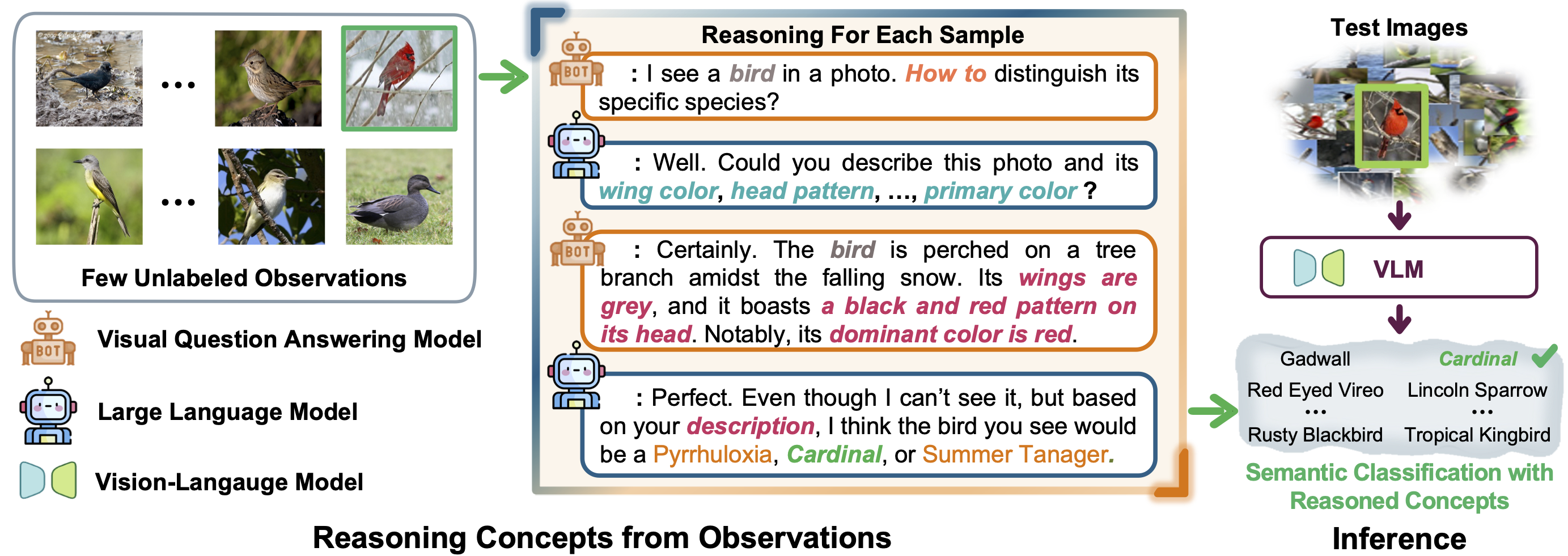
Democratizing Fine-grained Visual Recognition with Large Language Models
International Conference on Learning Representations (ICLR), 2024
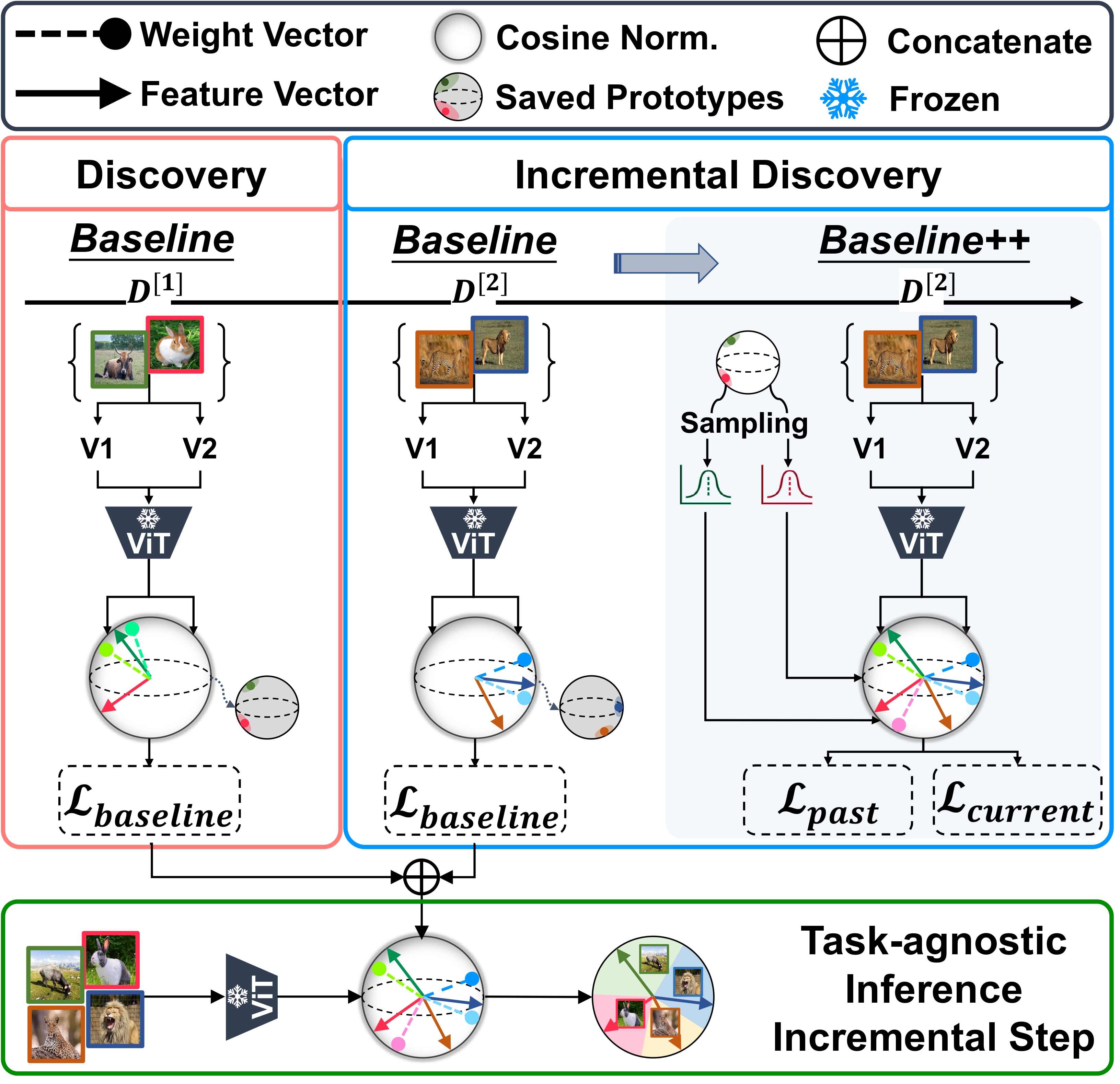
Large-scale Pre-trained Models are Surprisingly Strong in Incremental Novel Class Discovery
International Conference on Pattern Recognition (ICPR, Oral paper), 2024
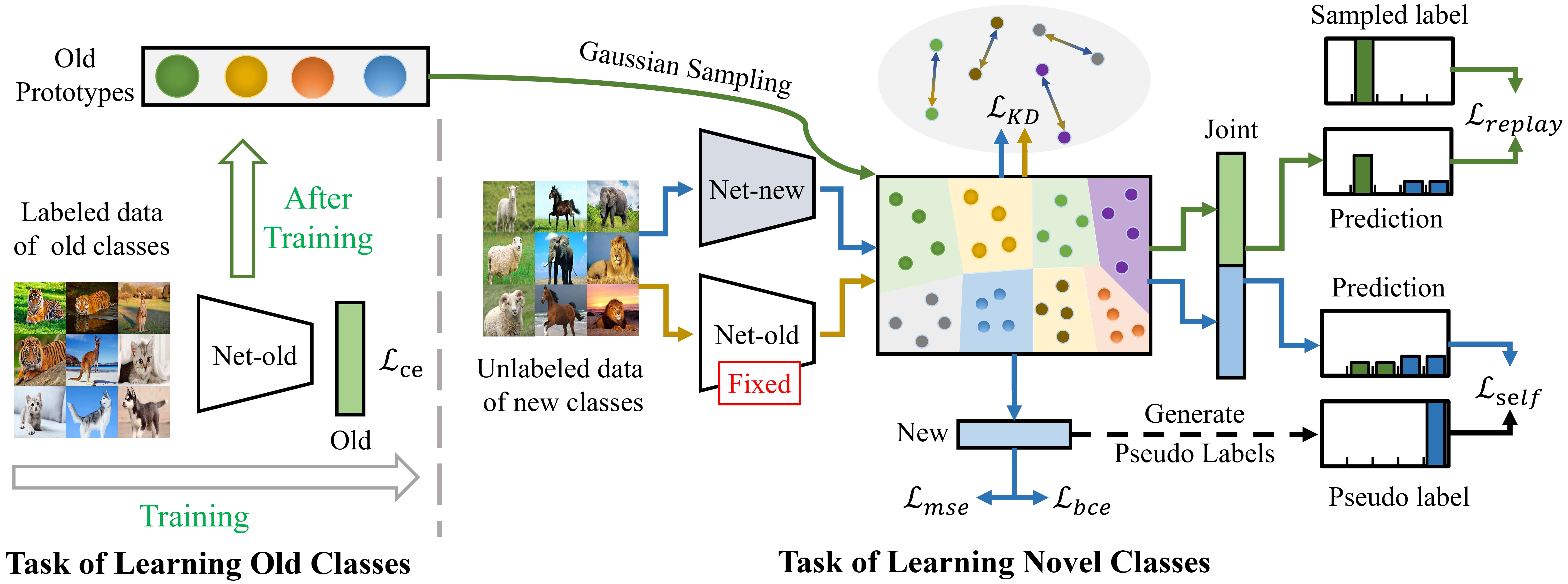
Class-incremental Novel Class Discovery
European Conference on Computer Vision (ECCV), 2022
Siemens RWG Control Platform Advanced Course and Practice
China Electric Power Press (CEPP), 2022
ISBN: 9787519859947
Tutorial book about IoT-based building automation control platform, including Programmable Logic Controller (PLC), Internet-of-Things (IoT), and cloud-based Software-as-a-Service (SaaS). Work carried out at SIEMENS.
Siemens Designo CC Building Management System Software and Practice
China Electric Power Press (CEPP), 2022
ISBN: 9787519853341
Tutorial book about building automation management software (Siemens Desigo CC). Work carried out at SIEMENS.
The V-SLAM Hurdler: A Faster V-SLAM System using Online Semantic Dynamic-and-Hardness-aware Approximation
Digitala Vetenskapliga Arkivet (DiVA, Master Thesis), 2022
Work done at Ericsson Lund, Sweden.
Project
ORB-SLAM3 Deployment on Underwater Autonomous Vehicle (UAV) SAM in Simulator and Real-world
Work carried at KTH Royal Institute of Technology supervised by Prof. John Folkesson, 2021
Hot Steel Plate Tracking and Rotation Angle Detection
Work carried at Technical University of Munich summer school for SMS Group, 2020
Mini Cheetah Robotic Leg Design, and Kinematic and Dynamic Simulation
Work carried at University of Trento supervised by Prof. Francesco Biral, 2020
Virtual RGB-D Camera Unity Implementation for Point Cloud Generation
Work carried at University of Trento, 2020
Community Service
- ICLR: Reviewer'2025, 2026
- NeurIPS: Reviewer'2024
- ICML: Reviewer'2025
- CVPR: Reviewer'2024, 2025
- ICCV: Reviewer'2025
- ECCV: Reviewer'2024
- IJCV: Reviewer'2024